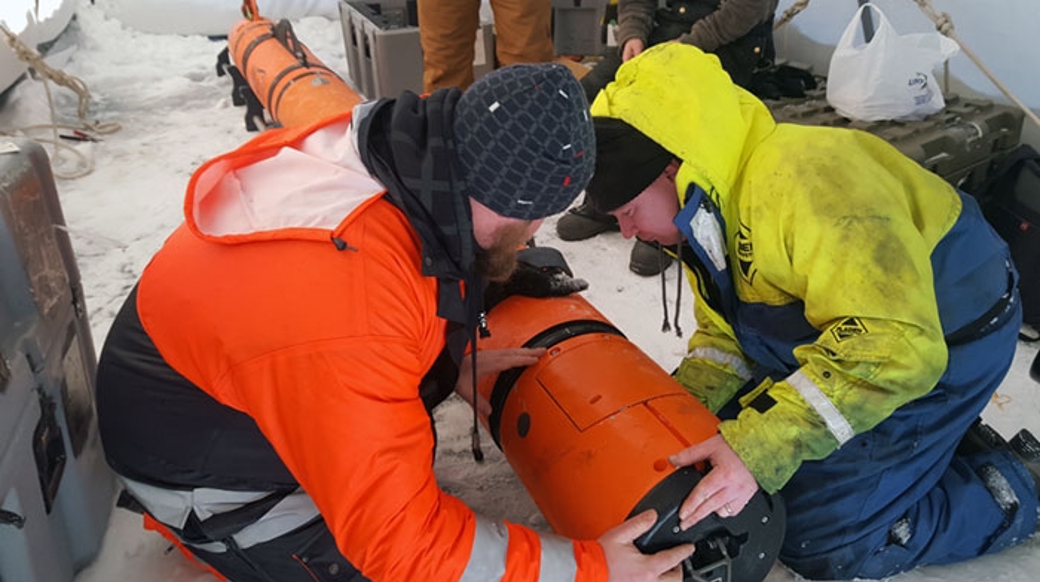
Requiring a survey delivering Multibeam, Sidescan and Sub Bottom profiler datasets beneath a frozen lake in North America it was obvious that a smaller vehicle could not contain the required payloads and a larger vehicle would be too difficult to get onto the ice. This made the compact modular design of the AUV perfect; it can be hand carried and mobilised literally anywhere, for example on a frozen lake.

Using an air boat, all equipment was brought to the launch site and after only a few hours' assembly the vehicle was ready to be switched on to start mission planning. The aim to launch from an ice hole was challenging, as getting a launch and recovery unit onto the ice was not possible. Instead the operation was started by simply pressing the vehicle down into the water. 20 degrees of pitch at propeller spin up was enough for the vehicle to get into the water and follow the mission plan to conduct the survey.
The problem under ice when looking to deliver absolute datasets is the need for accurate navigation. With no ability to surface for a GPS fix and no USBL to aid or update the navigation real time, the need for UTP or single transponder navigation is a necessity. The proprietary algorithm from KONGSBERG allowed the vehicle to navigate whilst still maintaining absolute positioning certainty within IHO specifications. The transponder deployment is very simple; drill a hole in the ice and invert the transponders on a 3 metre pole with a 180 degree beam pattern ensuring no blind zones. The -33 degrees Celsius temperatures meant that the poles were frozen in quickly, ensuring no movement!
As a proof check, RTK was used to give the transponder positions. By using standard interrogations it was possible to verify the CNODE range functionality by comparing to the RTK. Incredibly, even over 1.5km the CNODE range matches the RTK position to within 10cm. It is this range accuracy and the blending of KONGSBERG technology that allowed the vehicle to maintain IHO order positioning at all times.
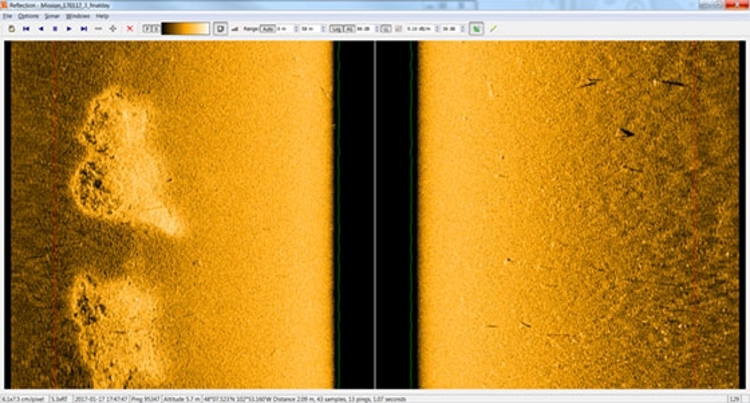
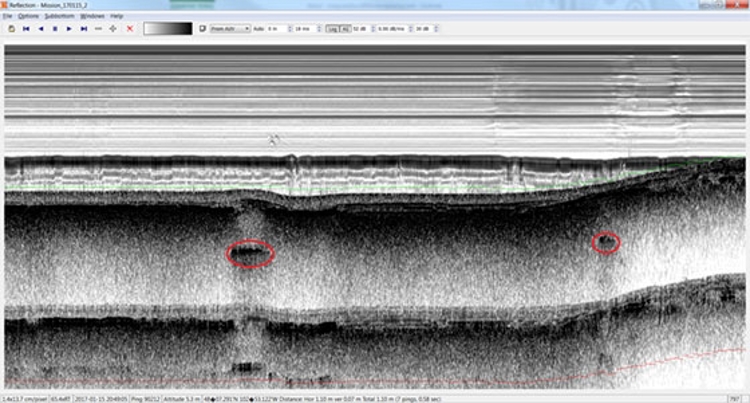
With such focus on mission planning it's quite easy to forget the primary role of any vehicle is to carry sensors and as we have come to expect, the KONGSBERG AUV handles this without issue. Logging SBP data alongside Sidescan and Multibeam, a pipeline crossing was surveyed showing both pipeline location and buried depth. In fact, the actual survey equipment and data gathering was the simplest part of the project. Ballard Marine construction, after analysing and checking all data, can provide its end client with high confidence in respect to the pipeline integrity.
Recovery was the next challenge. Traditionally, recovery is done using homing beacons but as the vehicle could maintain high accuracy positioning throughout the mission this option was not used, again a credit to the confidence that Ballard Marine had in the vehicle. Simply relying on the vehicle to come back to the ice hole as a simple mission waypoint was initially nerve racking but with each successful mission this extreme mission planning became a simple routine.
Getting the vehicle back exactly to a hole no larger than itself seemed initially impossible as it was necessary to estimate the drift and float up time after stopping the propeller. A small recovery ROV was on hand to recover AUV for the last few metres but after some trial and error the vehicle was recovered into the hole with a boat hook. The vehicle was underwater for more than 4 hours, travelling some 30Km. But it came back to the end point within one metre autonomously. And it is with this confidence in our technology that KONGSBERG customers will continue to succeed on challenging projects such as this.