PROXIMA - Integrated maritime sensor platform
The innovation project has contributed to the development of a new integrated maritime sensor platform for detection and classification of safety-critical objects around a ship.
Real sensor data from a larger ship has been used as test data in the project and new methods and algorithms have been developed that have been used in Kongsberg Seatex's new autonomy products.
Sensor Fusion
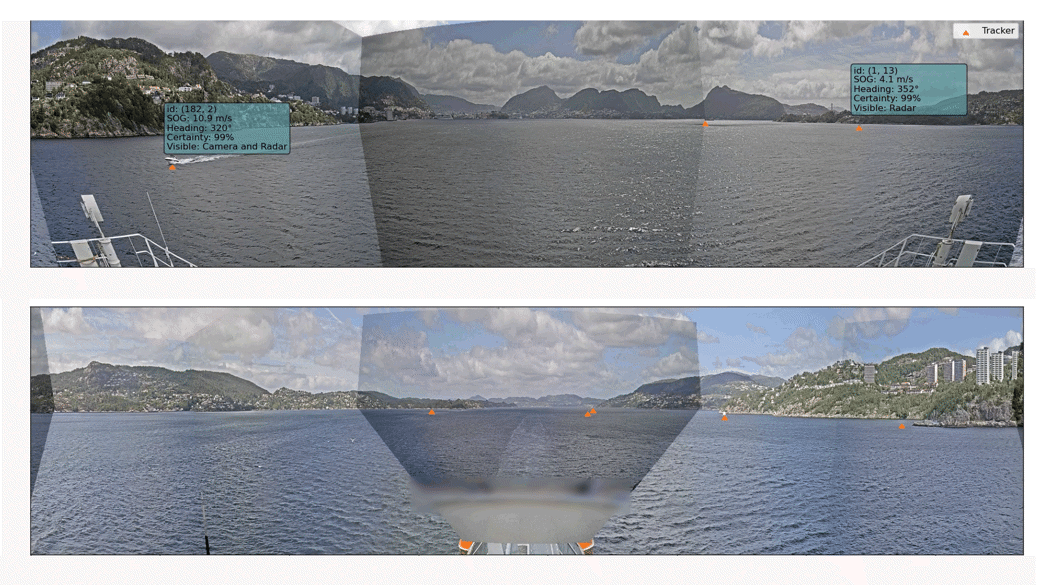
The project has primarily focused on data processing of image data from radars and cameras and can detect objects that are around the entire ship (360 degrees). New methods in detection extraction, camera calibration and automatic tracking of objects have been developed and provide information about the type of object, ie whether it is a ship or a beacon, land, etc. For detection and classification of objects, machine learning algorithms has been used. Throughout the project, the algorithms for tracking objects on the sea surface have been further developed with new functionalities to develop the robustness of the sensor platform. This can improve sensor models, as well as robust handling of error detections and for objects to be temporarily gone.
The path to autonomous ships
The sensor platform can be used on existing manned ships, remote-controlled ships and also for completely unmanned autonomous ships. In order to achieve the same operational safety as with manual navigation that is common today, it is important to develop a robust automation solution that ensures operational safety and good user interaction. During the project, field studies have therefore been carried out on both ferries and larger ships to investigate what information the user uses as a decision basis for navigation. The field study concluded that the navigator/captain uses both vision, camera and information from various navigation aids depending on the type of operation and whether it takes place in light or dark. Based on interviews with captains and navigators, some concepts for god user interaction were developed that can be used as a basis for further development of autonomous control systems.
The project also highlights challenges for insurance for autonomous ships. This gave us a good basis for issues around guilt issues if, for example, there are errors in hardware or software that go directly beyond operational safety.
The project concludes that developing a safe autonomous navigation solution requires multidisciplinary collaboration with various actors in the maritime value chain to ensure the necessary maritime safety when human navigation is completely or partially replaced by sensors and computers.